
 EU
EU 





Módulo de Controle com Driver Integrado para Motor Stepper – Desempenho e Precisão em Automatizações Industriais
Este módulo de controle com driver integrado é especialmente projetado para motores de passo de eixo único, oferecendo uma solução completa para automatizações industriais, controle CNC, robótica e sistemas de embalagem mecânica. Funciona de forma independente ou em combinação com outros sistemas, sem necessidade de Arduino ou Python, sendo ideal para aplicações de controle industrial e posicionamento preciso de motores stepper.
Características principais
- Controlador e Driver Integrado: Realiza o controle do motor passo-a-passo e monitora o estado de funcionamento em tempo real.
- Rotação para Frente e Trás: Muda a direção de rotação via botão ou potenciômetro, automaticamente conforme o modo de operação.
- 3 Modos de Controle: Modo predefinido, controle por botões externos ou drivers adicionais.
- 9 Programas de Trabalho: Inclui programas para diversas aplicações: Frente/Trás, Atraso, Loop, Bloqueio automático, Velocidade de rotação e outros.
- Display LCD HD: Exibe velocidade, número de ciclos e parâmetros de controle, com função de memória e alta precisão.
Parâmetros técnicos
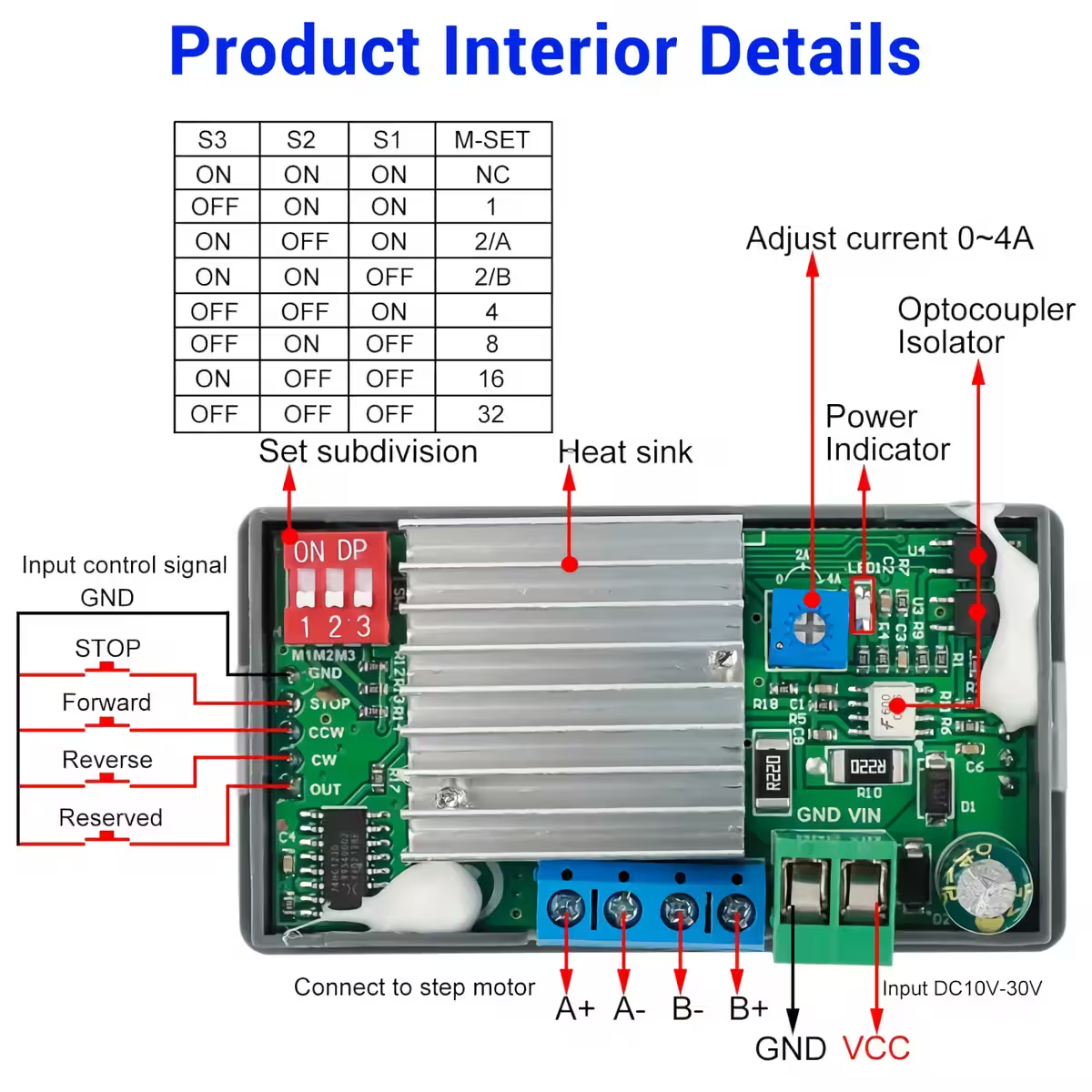
- Tensão de entrada: DC 5V-30V
- Corrente de saída/driver: 4A (máx.)
- Eixos de controle: Eixo único
- Motor compatível: Stepper 42/57 (Nema17 / Nema23)
- Velocidade de controle: 0,1-999 RPM
- Número de pulsos frente/trás: 1-9.999.999
- Número de ciclos: 1-9.999 ou loop infinito
- Atraso frente/trás: 0,0-999,9 segundos
- Subdivisão: 1/2/4/8/16/32
- Controle aceleração/desaceleração: Sim
- Proteção inversão de polaridade de entrada: Sim
- Modos de controle: Automático/Manual/Configuração
- Temperatura de operação: -20°C a 85°C
- Umidade de operação: 5% a 95% RH
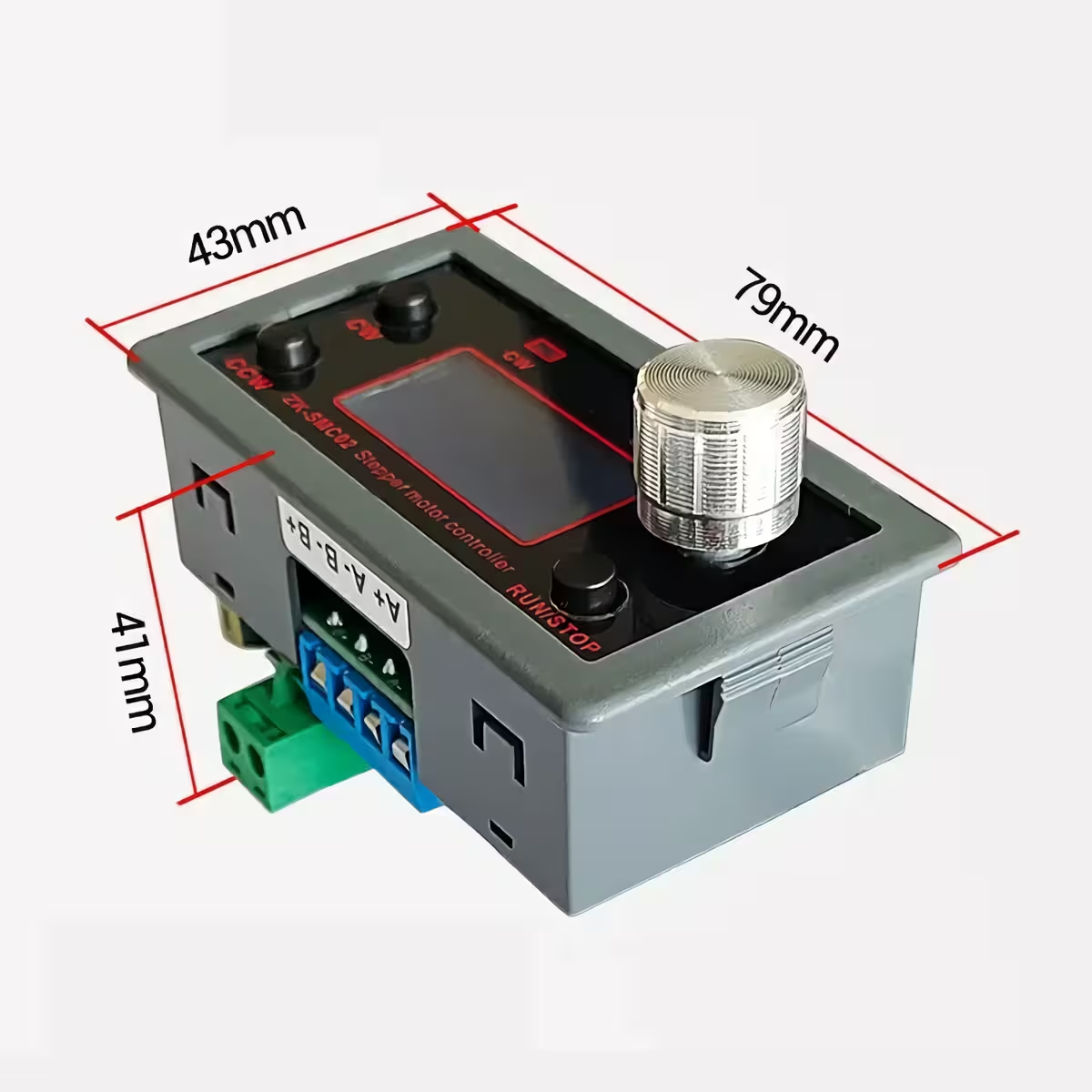
- Dimensões do módulo: 79 x 43 x 41 mm
Métodos de configuração
1. Interface de operação
- A primeira linha exibe a velocidade de rotação em RPM.
- A segunda linha mostra o tempo de atraso ou o número de ciclos, ajustáveis pelo menu F-10.
- Botão CW: rotação para frente.
- Botão CCW: rotação para trás.
- Botão RUN/STOP: iniciar/parar.
- Potenciômetro: ajuste de velocidade em ambos os sentidos.
- Segurar o potenciômetro >3 segundos: entra no modo de configuração de parâmetros.
2. Interface de parâmetros
- Girar o potenciômetro seleciona o parâmetro F-01~F-13.
- O parâmetro selecionado pisca.
- Pressionar o potenciômetro seleciona o valor.
- Alteração do valor girando o potenciômetro ou selecionando bits.
- Botão RUN/STOP confirma os parâmetros.
- Salvar e sair do modo de configuração após >3 segundos.
3. Função auxiliar
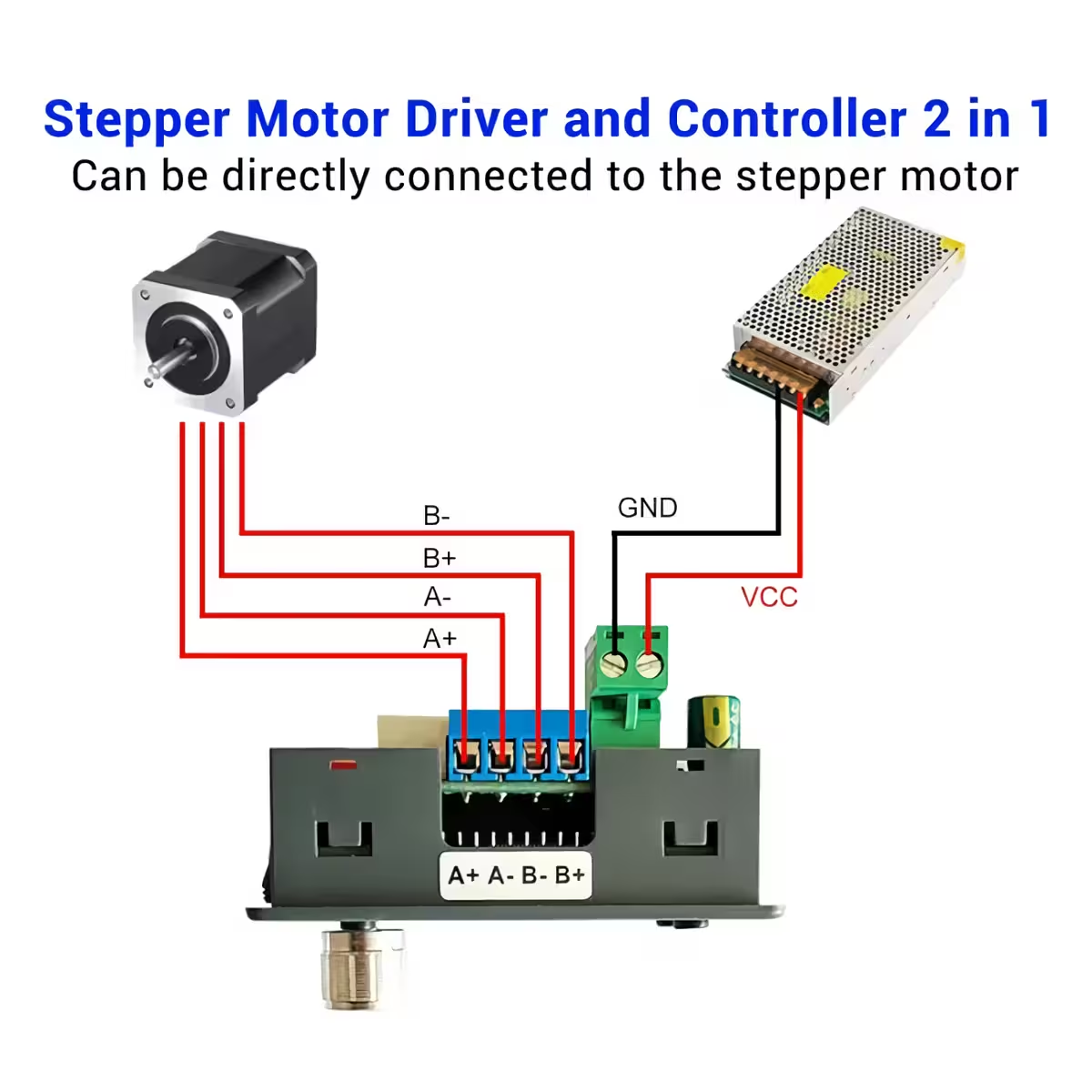
- Operação independente conectando apenas a alimentação e o motor.
- Possibilidade de conectar botões externos para controle adicional.
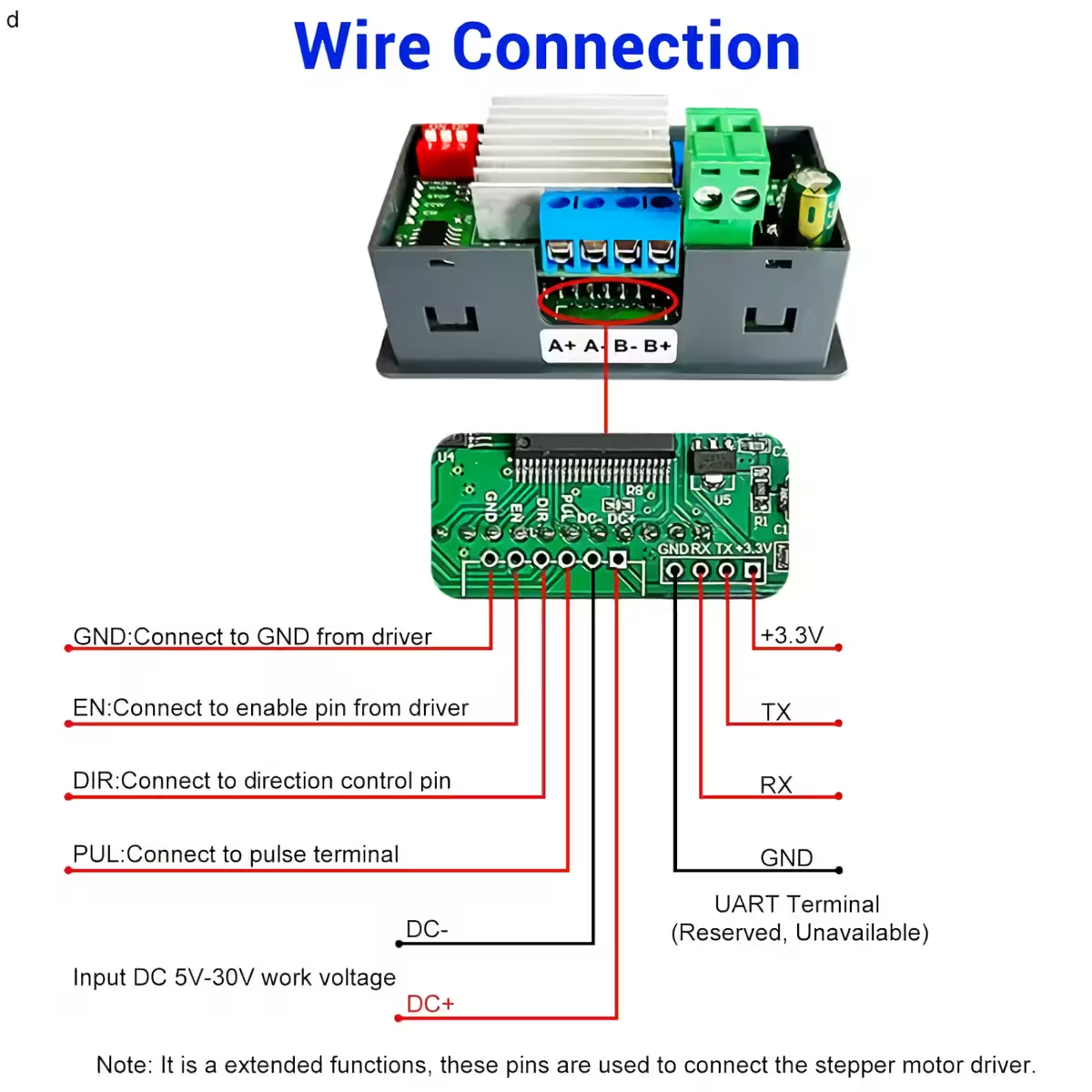
- Compatível com outros drivers para motores stepper – modo Auto/Manual/Setup.
4. Modo de operação
- Modo de Controle Automático: opera com os parâmetros configurados.
- Modo de Controle Manual: requer conexão dos botões aos terminais COM/STOP/CCW/CW.
- Modo de Configuração: conectar a outros drivers para motores stepper.
Notas importantes
- Compatível com motores passo-a-passo de 2 fases, independentemente do número de fios (4, 5, 6 ou 8).
- Inclui drivers e controladores integrados, mas também pode ser conectado a drivers externos.
Aplicações
- Controle automatizado industrial
- Máquinas CNC
- Embalagem mecânica
- Processamento e teste eletrônico
- Linhas de montagem automática
- Robótica e automação de processos
- Sistemas de posicionamento e movimento
| Parâmetro | Função | Intervalo de Configuração | Valor Padrão |
|---|---|---|---|
| F-01 → ? | Selecionar modo de operação. Consulte a tabela a seguir. | P01~P09 | P01 |
| F-02 | Número de pulsos para frente. Alteração do bit High/Low pressionando o potenciômetro: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-03 | Velocidade de rotação para frente em RPM | 0.1~999.9 | 10 |
| F-04 | Número de pulsos para trás. Alteração do bit High/Low pressionando o potenciômetro: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-05 | Velocidade de rotação para trás em RPM | 0.1~999.9 | 10 |
| F-06 | Número de ciclos de trabalho (‘—-’ significa loop infinito) | 0~9999 ou loop infinito | 1 |
| F-07 | Atraso na posição de avanço em segundos. ±0.2s | 0.0~999.9 | 0 |
| F-08 | Atraso na posição de retorno em segundos. ±0.2s | 0.0~999.9 | 0 |
| F-09 | Número de pulsos para uma rotação. Unidade 10. Ex.: passo de 1.8° e subdivisão 8 → 360/1.8*8 = 1600. Valor configurado: 160. | 1~9999 | 160 |
| F-10 | Configura parâmetros do LCD: 0: 1ª linha mostra RPM, 2ª linha mostra tempo de atraso em segundos. 1: 1ª linha mostra RPM, 2ª linha mostra número de ciclos. | 0 ou 1 | 0 |
| F-11 | Configura estado do motor após botão RUN/STOP: 0: Redução lenta e parada. 1: Parada imediata. | 0 ou 1 | 0 |
| F-12 | Configura nível de aceleração/desaceleração: 001 mais lento, 100 mais rápido. | 001~100 | 20 |
| F-13 | Configura endereço do dispositivo | 001~255 | 1 |
| Modo de Operação | Processo de Trabalho |
|---|---|
| F-01 → P01 |
1. Motor funciona com rotação do potenciômetro. Outros botões inativos. 2. Motor gira para frente e indicador CW acende se potenciômetro girado no sentido horário. 3. Motor gira para trás e indicador CCW acende se potenciômetro girado no sentido anti-horário. |
| F-01 → P02 |
1. Motor gira conforme pulsos F-02 e F-04. 2. Motor para após cada conjunto de pulsos e pode ser reiniciado com potenciômetro. 3. Loop repete conforme número de ciclos definido em F-06. |
| F-01 → P03 |
1. Motor gira e para alternadamente conforme pulsos definidos. 2. Direção frente/trás conforme F-02/F-04. 3. Reiniciar RPM pelo potenciômetro. 4. Nota: Pare o motor antes de mudar a direção. |
| F-01 → P04 |
1. Motor gira F-02/F-04 e para, repetindo loop F-06. 2. Frente: F-02 → parada F-07 → loop. 3. Trás: F-04 → parada F-08 → loop. 4. Reiniciar RPM com potenciômetro. 5. Nota: Pare o motor antes de mudar a direção. |
| F-01 → P05 |
1. Motor gira F-02/F-04, depois retorna na direção oposta e repete loop F-06. 2. Frente: F-02 → parada F-07 → loop → retorno. 3. Trás: F-04 → parada F-08 → loop → retorno. 4. Reiniciar RPM com potenciômetro. 5. Nota: Pare o motor antes de mudar a direção. |
| F-01 → P06 |
1. Motor gira F-02/F-04, muda direção e repete loop F-06. 2. Frente: F-02 → parada F-07 → inversão F-04 → parada F-08 → loop. 3. Trás: F-04 → parada F-08 → inversão F-02 → parada F-07 → loop. 4. Reiniciar RPM com potenciômetro. 5. Nota: Pare o motor antes de mudar a direção. |
| F-01 → P07 |
1. Motor gira conforme pulsos e retorna na direção oposta. 2. Frente: F-02 → parada F-07 → retorno. 3. Trás: F-04 → parada F-08 → retorno. 4. Reiniciar RPM com potenciômetro. |
| F-01 → P08 |
1. Motor gira pelo tempo de atraso F-07/F-08 e para, repetindo loop F-06. 2. Frente: F-07 → parada F-08 → loop. 3. Trás: F-08 → parada F-07 → loop. 4. Reiniciar RPM com potenciômetro. 5. Nota: Pare o motor antes de mudar a direção. |
| F-01 → P09 |
1. Motor gira frente F-02, para por F-07, gira trás F-04, para F-08, loop F-06. 2. Reiniciar RPM com potenciômetro. 3. Nota: Pare o motor antes de mudar a direção. |












Avaliações
Ainda não existem avaliações.