


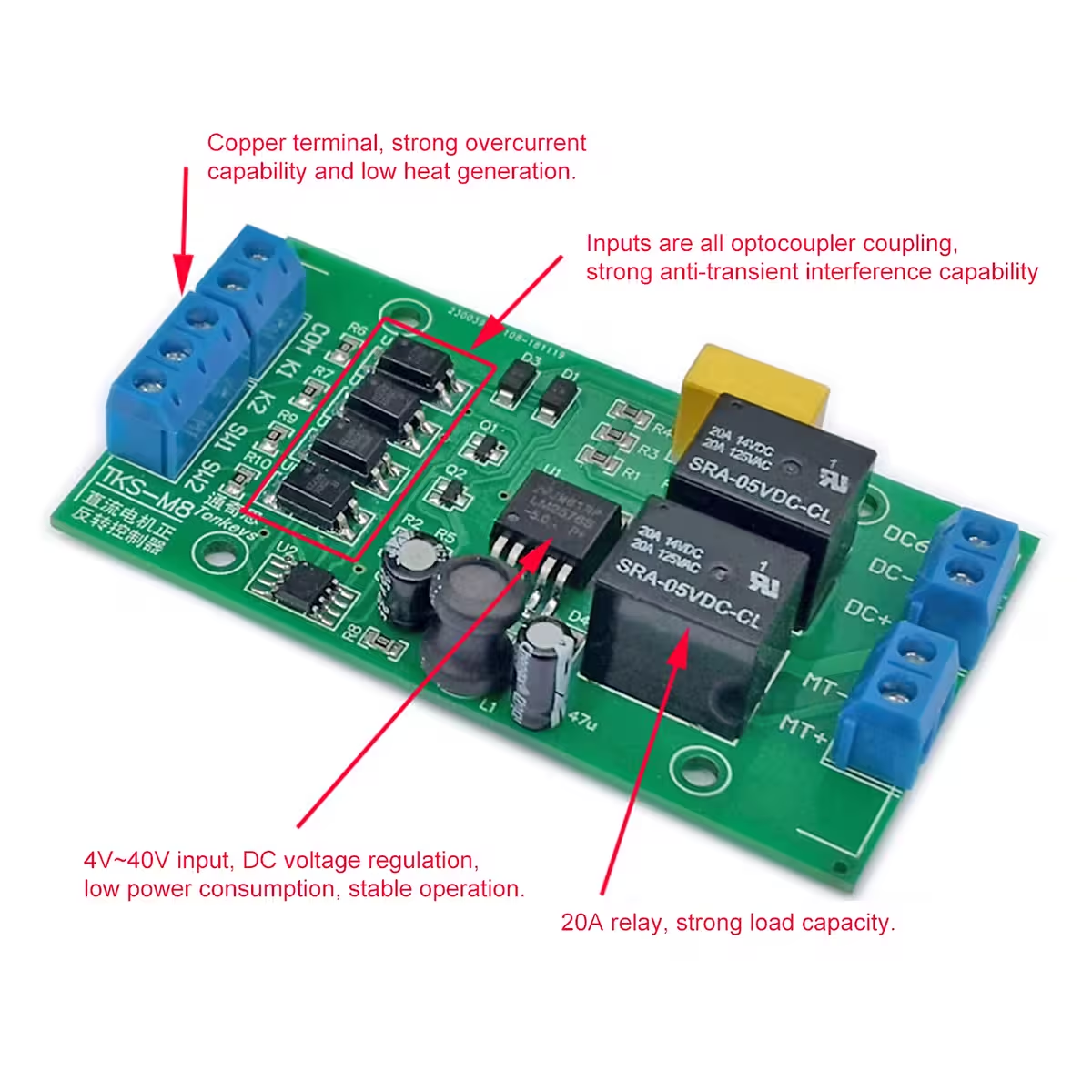
Controlador de direção para motor DC – controle o movimento para a frente/trás sem componentes externos
Tem um atuador linear, um mecanismo reversível ou um projeto DIY que exige um controlo preciso da direção? Sem um módulo dedicado, acaba rapidamente por recorrer a relés, transístores e cablagens complexas. Este controlador de direção para motor DC resolve tudo num único módulo compacto: basta ligar a fonte de alimentação, o motor e os botões, e está pronto a funcionar em poucos minutos.
Nota: O motor recebe a mesma tensão da fonte de alimentação. A tensão não é regulável através deste controlador.
Por que escolher este modelo? (Principais vantagens):
- Ampla gama de tensões: 4–40V DC — compatível com baterias LiPo, fontes de laboratório ou alimentadores industriais, sem necessidade de modificações
- Corrente de saída até 20A — gere motores com picos de arranque elevados, adequado para cargas até ~80W
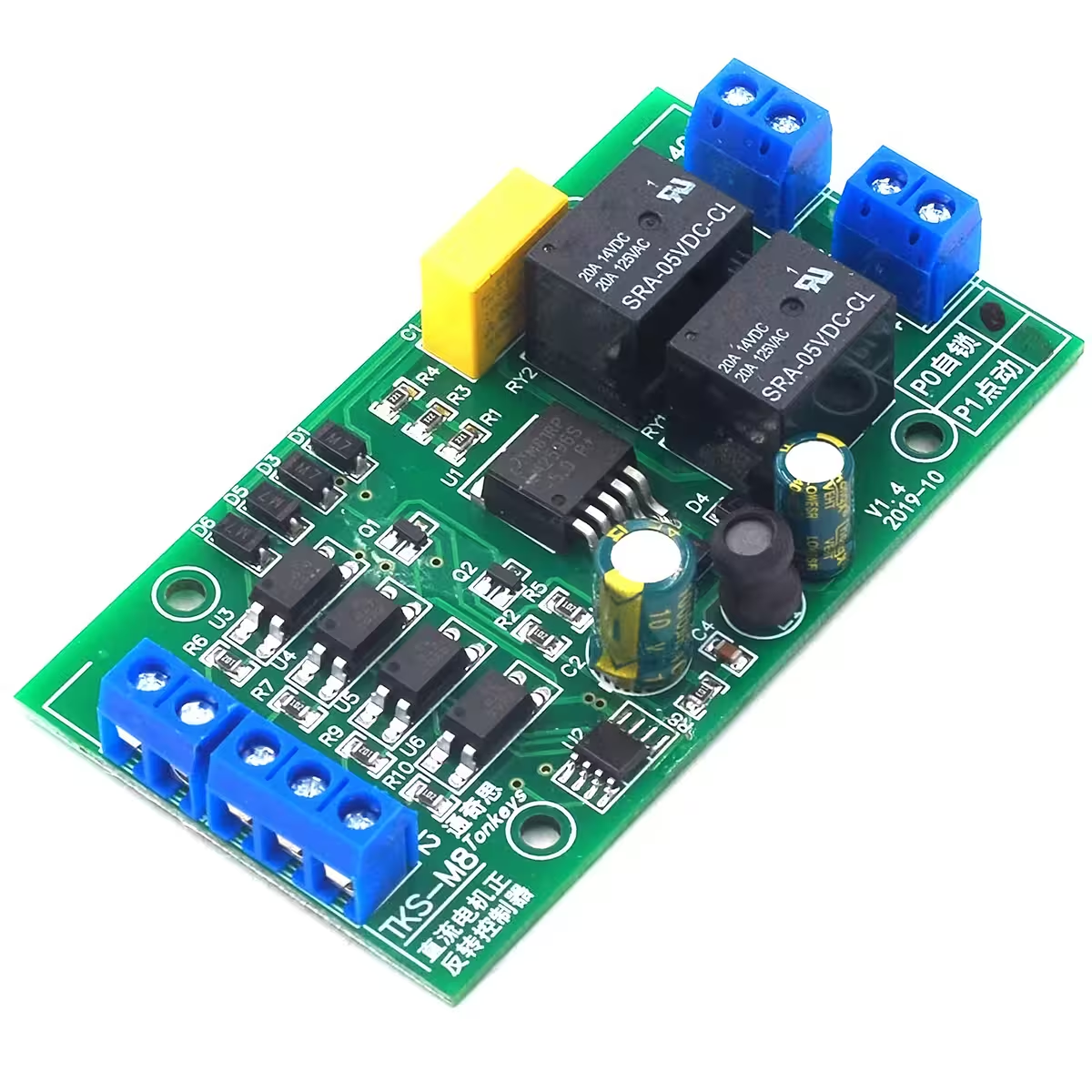
- Dois modos selecionáveis: PO e P1 — escolha entre auto-retenção (arranque com impulso curto) e modo jog (ativo apenas enquanto mantém premido), dependendo da aplicação
- Entradas universais active-low — ligue diretamente botões simples, fins de curso mecânicos NO ou sensores NPN de 3 fios, sem resistências ou lógica adicional
- Fins de curso integrados SW1/SW2 — paragem automática no final do curso, eliminando o risco de bloqueio mecânico ou sobrecarga
- Vida útil >150.000 ciclos — fiabilidade comprovada para aplicações com ciclos repetitivos diários
- Consumo próprio reduzido: 0,6W ativo / 0,1W standby — não drena a bateria quando o sistema está em espera
Detalhes e Desempenho
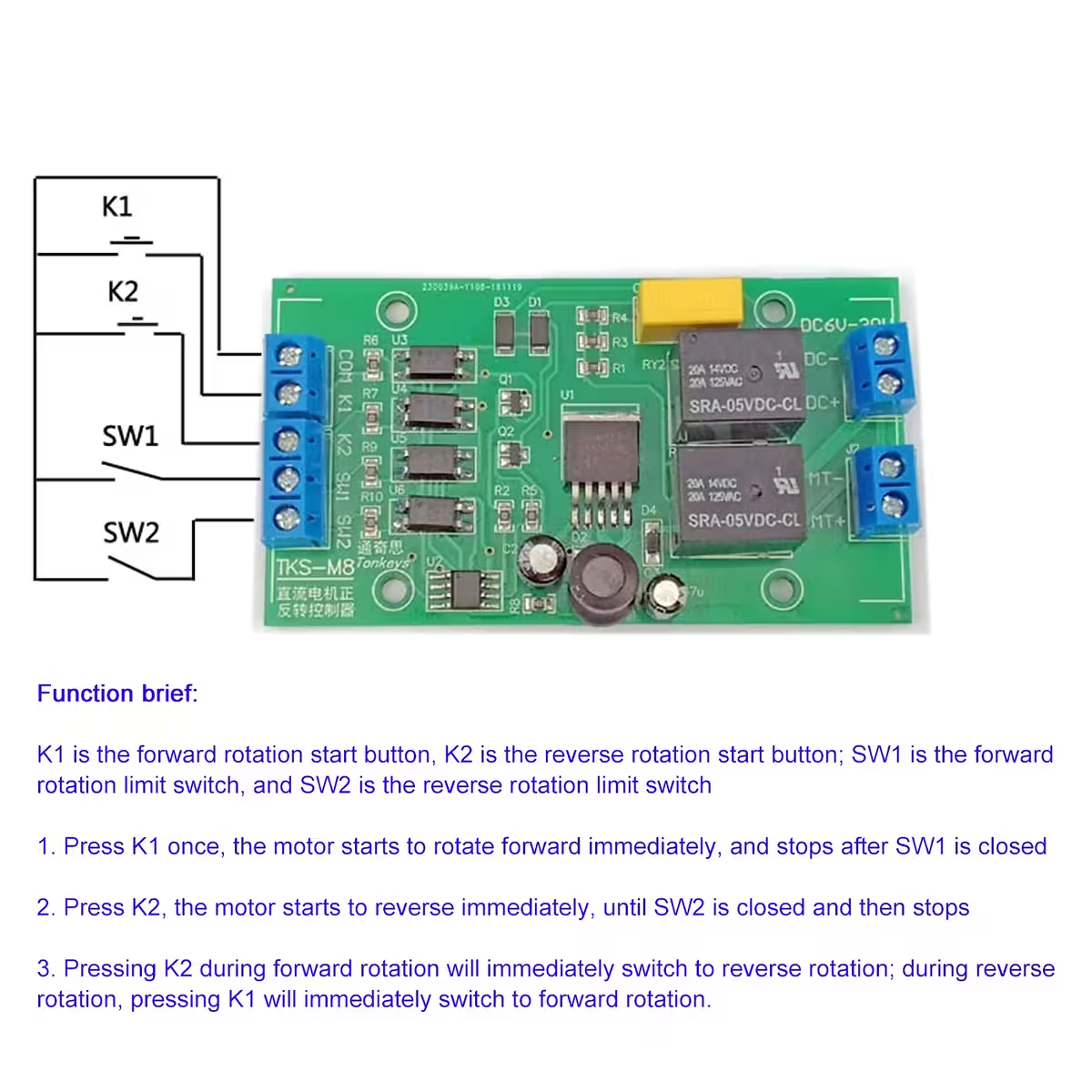
O controlador utiliza uma arquitetura baseada em entradas active-low: uma entrada é ativada quando a tensão desce abaixo dos 2V. Isto significa que botões simples, fins de curso mecânicos NO (normalmente abertos) e sensores NPN-NO de 3 fios ligam-se diretamente, sem componentes intermédios.
O tempo de resposta é de ≈20ms para os comandos K1/K2 e ≈50ms para os fins de curso SW1/SW2 — suficientemente rápido para aplicações dinâmicas e estável para evitar ativações acidentais.
Em tensões mais elevadas, a corrente recomendada diminui: a 12V pode utilizar até 20A, enquanto a 24V recomenda-se a limitação a ~10A para um funcionamento térmico seguro a longo prazo. Utilize sempre um fusível devidamente dimensionado e cabos adequados à carga.
| Parâmetro | Valor / Detalhe |
|---|---|
| Tensão de funcionamento | DC 4–40V (recomendado 6–36V) |
| Corrente máxima de saída | até 20A (a 12V) |
| Potência do motor recomendada | até ~80W |
| Consumo do módulo (ativo) | aprox. 0,6W |
| Consumo do módulo (standby) | aprox. 0,1W |
| Tipo de sinal de entrada | Active-low (ativo a tensão < 2V) |
| Tempo de resposta K1/K2 | ≈ 20ms |
| Tempo de resposta SW1/SW2 | ≈ 50ms |
| Modos de funcionamento | PO (auto-retenção) / P1 (jog) |
| Vida útil | >150.000 ciclos |
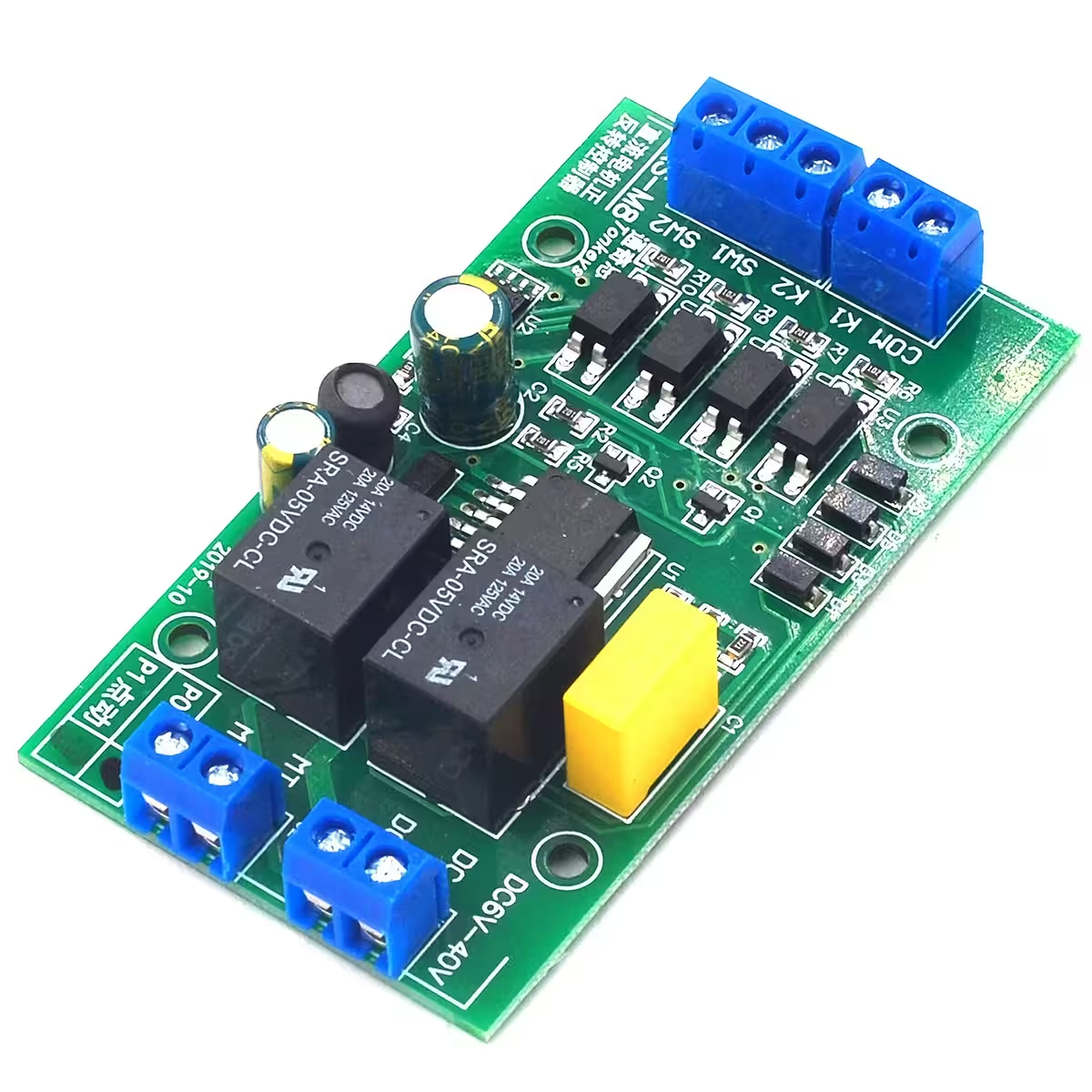
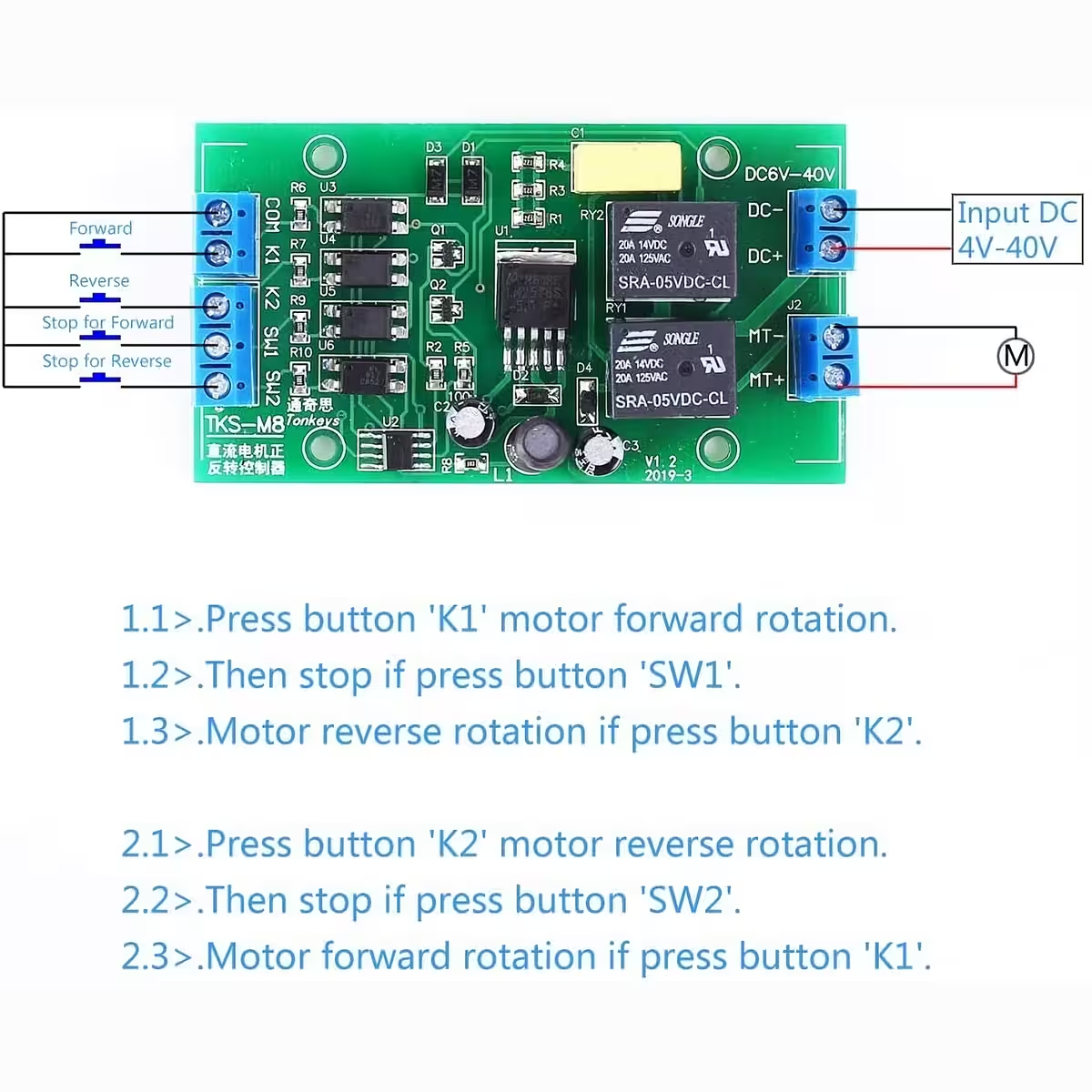
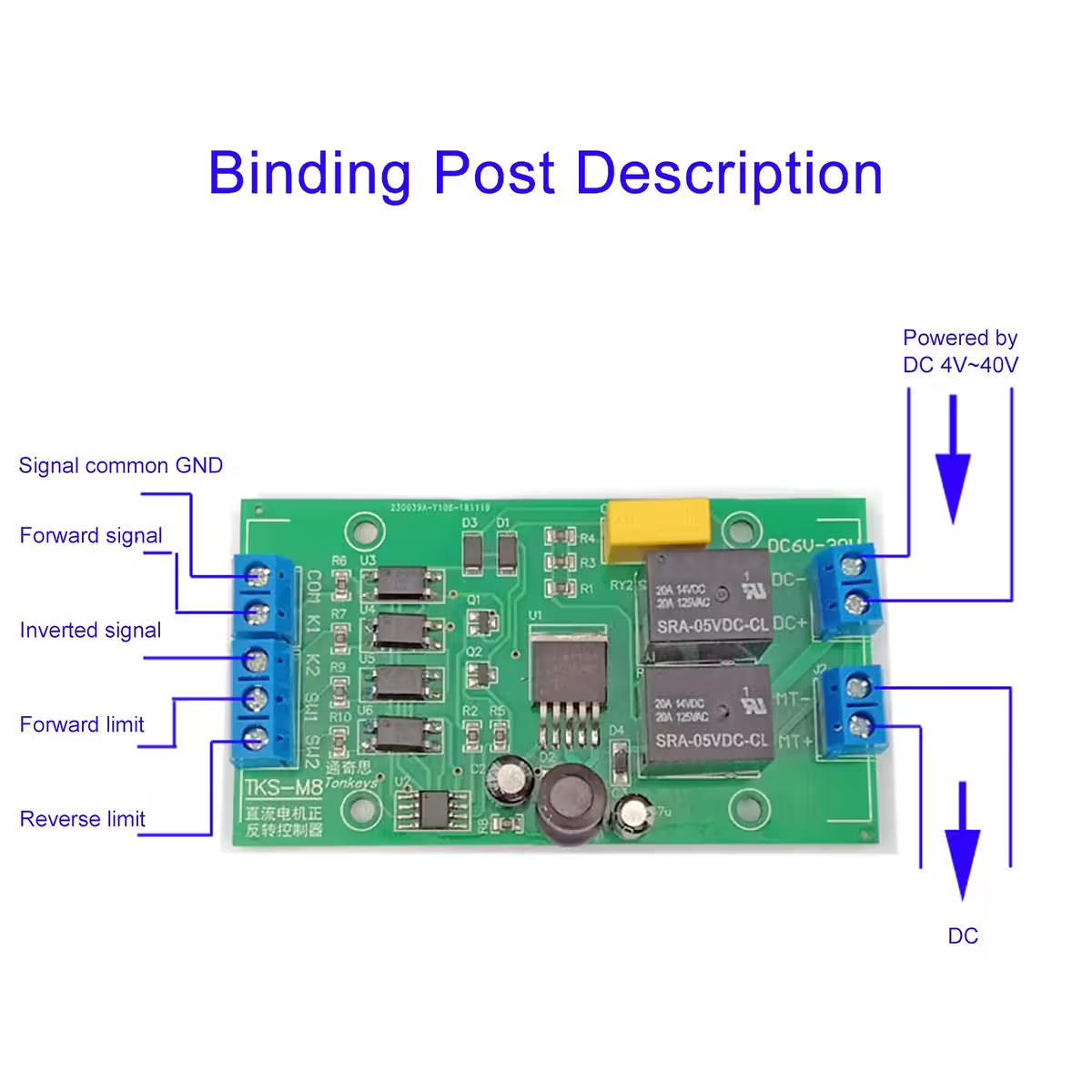
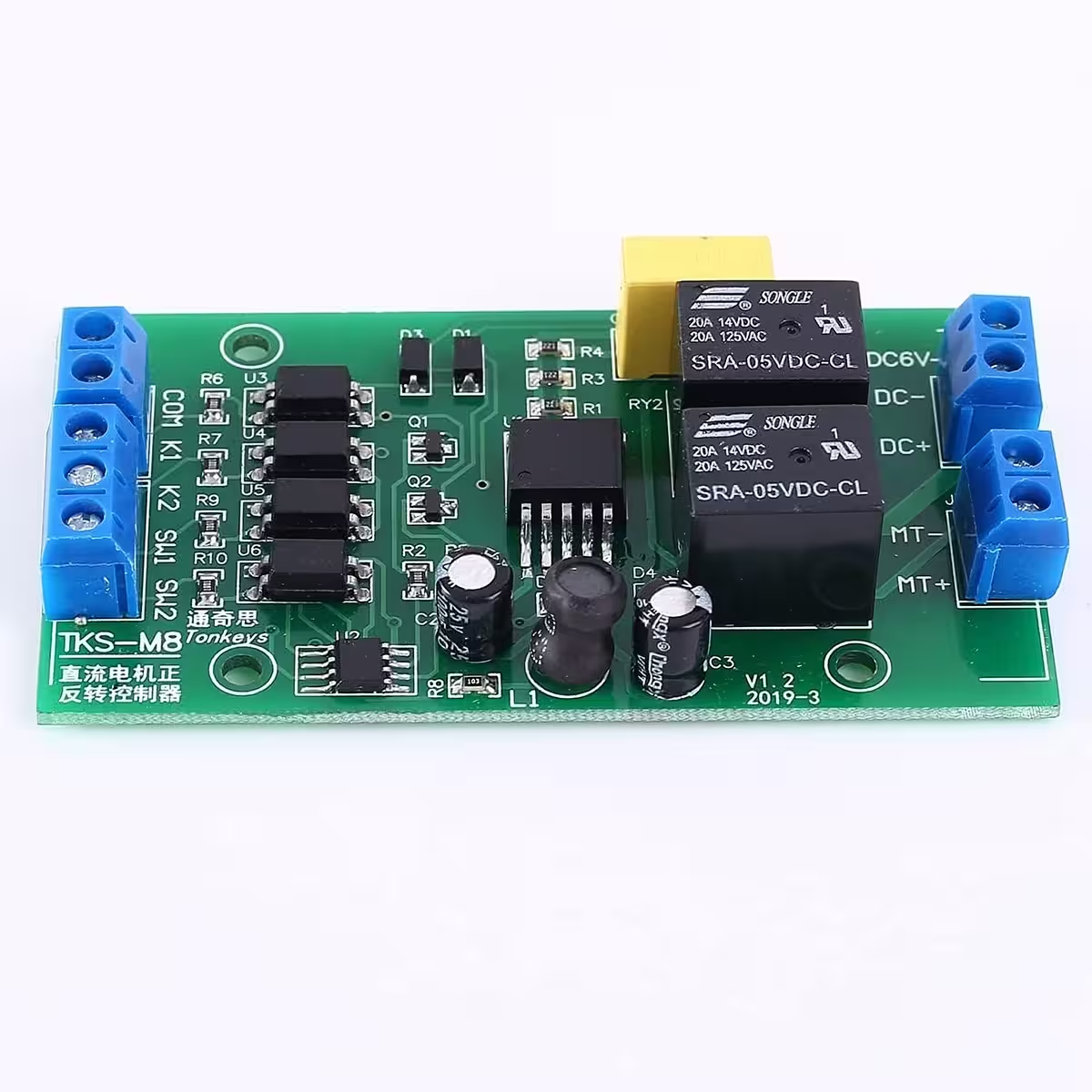
| Entrada K1 | Comando marcha para a frente (active-low) |
| Entrada K2 | Comando marcha para trás (active-low) |
| SW1 | Fim de curso marcha para a frente (NO recomendado) |
| SW2 | Fim de curso marcha para trás (NO recomendado) |
| VIN+ / VIN- | Alimentação do módulo DC 4–40V |
| Motor+ / Motor- | Saída para motor DC |
Instruções de Programação e Utilização
Modo PO (Auto-retenção): Um impulso curto em K1 ou K2 liga o motor. Este continua a funcionar autonomamente até à ativação do fim de curso correspondente ou até receber o comando oposto. Ideal para automatizações.
Modo P1 (Jog): O motor está ativo apenas enquanto o comando K1 ou K2 permanecer ativado. Ideal para ajustes finos e posicionamento manual.
- Ligue a fonte de alimentação a VIN+ e VIN– (respeite a polaridade).
- Ligue o motor DC a Motor+ e Motor–.
- Selecione o modo de funcionamento: PO para auto-retenção ou P1 para jog.
- Ligue os botões ou sinais de comando a K1 (frente) e K2 (trás) — entradas active-low.
- Ligue opcionalmente os fins de curso mecânicos ou sensores NPN-NO a SW1 e SW2.
- Para movimento automático cíclico A→B→A: ligue as saídas dos interruptores NO da posição A a K1 e da posição B a K2, deixando SW1/SW2 desligados.
- Para integração com Arduino: ligue o GND do Arduino ao GND do controlador, o pino digital para a frente a K1 e o pino digital para trás a K2. Configure os pinos como OUTPUT e escreva LOW para ativar.
- Verifique a corrente de arranque do motor e instale um fusível devidamente dimensionado na linha de alimentação.
Conteúdo da Embalagem
- 1 × Controlador de direção para motor DC (Forward / Reverse), modos PO/P1
Perguntas Frequentes
O que significa active-low e por que é importante?
A entrada é ativada quando a tensão desce abaixo dos 2V — ou seja, quando é ligada à massa (GND). Botões simples, fins de curso mecânicos NO e sensores NPN funcionam exatamente assim. Não necessita de resistências adicionais ou lógica inversora.
Qual é a diferença entre o modo PO e o modo P1?
No modo PO, um impulso curto em K1 ou K2 liga o motor e este continua autonomamente até ao fim de curso ou comando oposto — útil para automatizações. No modo P1, o motor funciona apenas enquanto o comando é mantido ativo — útil para ajustes precisos ou controlo manual.
Posso ligar este controlador diretamente ao Arduino?
Sim. Ligue o GND do Arduino ao GND do controlador e utilize dois pinos digitais configurados como OUTPUT. Quando o pino está em LOW, o comando é ativado. O Arduino gere a lógica e o controlador gere a potência — sem componentes intermédios.
Posso usar fins de curso com contacto normalmente fechado (NC)?
O controlador está otimizado para fins de curso NO (normalmente abertos). Os contactos NC invertem a lógica e podem gerar comportamentos indesejados. Utilize sempre contactos NO para SW1 e SW2.
É necessário um dissipador de calor na corrente máxima?
Para correntes próximas dos 20A ou em ciclos intensivos, assegure uma ventilação adequada e monitorize a temperatura do módulo. Para aplicações contínuas com carga elevada, um pequeno dissipador ou ventilação forçada pode prolongar significativamente a vida útil.
Como crio um movimento automático cíclico sem temporizador?
Ligue os interruptores NO da posição A a K1 e da posição B a K2, deixando SW1 e SW2 desligados. Ao atingir cada fim de curso, o interruptor ativa automaticamente o comando para o sentido oposto — o motor oscila continuamente sem intervenção externa.
Vídeo de apresentação
Galeria de fotos












Avaliações
Ainda não existem avaliações.